在前两期的小讲堂中,我们简要介绍了米勒钳位与短路保护的相关内容。我们也注意到,大家对 di/dt 设计的相关推文期待很高,但由于内容准备仍需时间,我们将尽快为大家呈现。本期我们先探讨一个SiC应用中的核心问题:SiC并联时的环流问题。
1. 环流的影响
为何要关注环流?在使用IGBT时,我们同样会遇到环流问题,但由于IGBT开通速度较慢(即dv/dt较低),该问题并不十分突出。然而,对于SiC器件,其高速开关特性使得环流问题变得尤为显著。
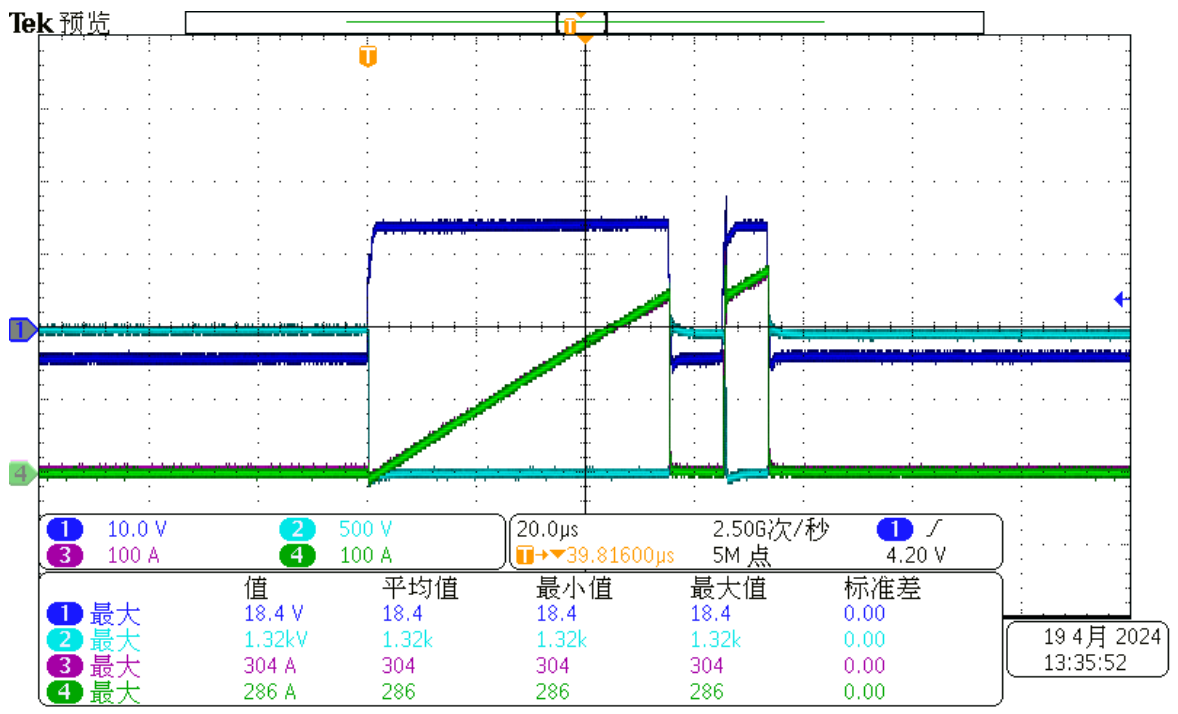
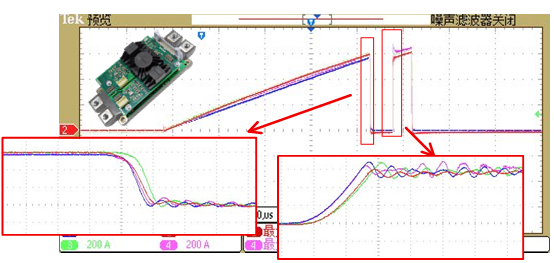
下图展示了采用传统IGBT驱动方案设计的一款SiC两并联驱动的测试波形。在测试A模块时,可以观察到在二次开通瞬间,其栅极电压出现了明显的过冲与振荡,会有损坏栅极的风险。同时由于开通时栅极电压VGS轻微的变化就会对电流产生极大的影响,因此也会影响均流效果,从而降低系统稳定性和性能。
因此,我们有必要研究为什么会出现这种现象。
2.环流从何而起
环流是一个复杂的问题,会涉及驱动回路和整个功率回路。简单来说,就是模块和模块,回路和回路之间的差异导致了预期外的电流。
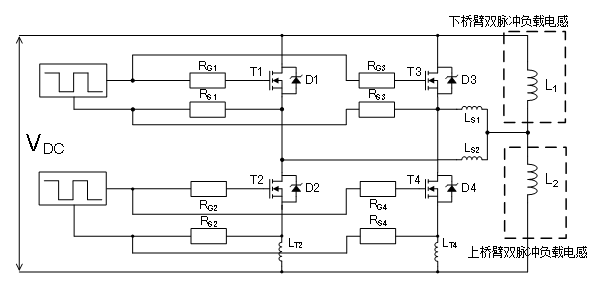
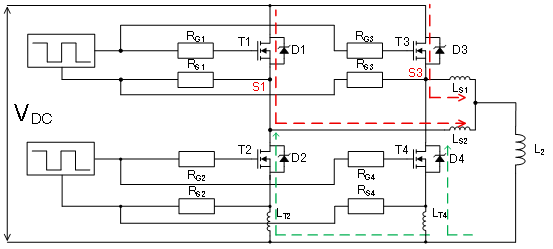
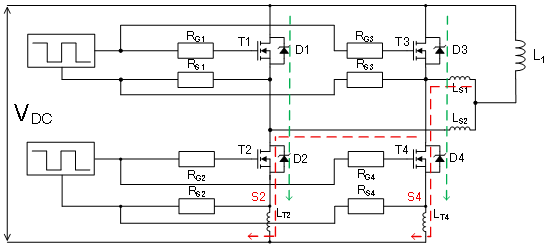
下图是一个典型的两并联驱动电路。T1,T2组成一个半桥,T3,T4组成另一个半桥,T1和T3并联,T2和T4并联。D1~4代表对应的续流二极管。RG代表栅极电阻,RS代表在栅极和源极之间的放电电阻。LS是左右两个半桥的杂感。LT是T2和T4源极上的杂感。L1和L2是负载电感。当我们讨论环流时,其本质就是源极上由于回路杂感造成的电位差引起的栅极电压差。IGBT模块的di/dt较低,而SiC的di/dt能轻松达到>5000A/μs,甚至>10kA/μs,因此杂感的影响被急剧放大。
我们先从受影响最大的上桥臂的开关过程来进行分析:
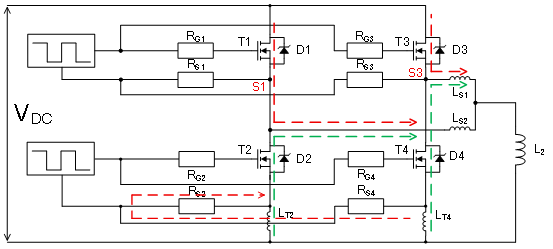
在二次开通过程中,我们开通T1和T3,此时T2和T4关断,那么D2和D4就会进入反向恢复的过程,绿色的箭头代表其续流路径。斜率不一致的di/dt,大小不同的杂感,不同步的开通等情况都会在LS1和LS2上就会感应出不同大小和方向的电压,从而在S1和S3两个点上产生电压差。在实际的测试当中,有两种主要的情况。
1.T1和T3无法同时开通。例如由于芯片一致性差所造成的开通阈值不一样就会出现这种情况。假设T3先于T1开通,那么S3上的电压就会高于S1,从而形成一条经过RS3和RS1的环流,此时VS3-VS1=VLS1+VLS2。
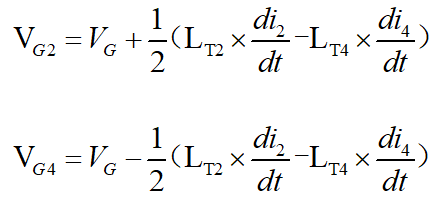
2.T1和T3可以同时开通。但是模块性能有差异。此时S1和S3上的电位差等于:
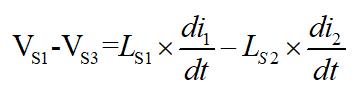
驱动栅极的均压取决于两个关键因素:di/dt(电流变化率)和LS(回路杂感)。由于di/dt可以达到10kA/μs的级别,因此这个电位差可以非常大。
同时由于LT2和LT4的差别,会导致如图中的红色电流经过RS4和RS2。此时下桥臂的栅极电压也会出现正压或负压的过冲,最终电压的大小取决于T2和T4本身的特性以及杂感LT2和LT4的大小。也因此针对SiC并联的使用场景,米勒钳位是一个非常重要的功能来保证对管栅极电压的稳定。
以上的分析解释了为什么栅极电压会发生突变,同时在模块内部和整个回路当中还有大量很难计算的寄生电容,例如栅极和散热器之间,栅极内部和源极/漏极之间等等形成了RCL谐振,造成了我们看到的这种波形。
在整个过程中,模块本身对结果的影响有多大呢?对比上面的波形,我们用相同的驱动在相同的测试条件下测试另外一个B模块得到了下面的波形。我们可以发现二次开通的时候振荡明显消失,但是仍然存在一个小尖峰。因此我们可以确认模块本身对于结果的影响是非常大的。
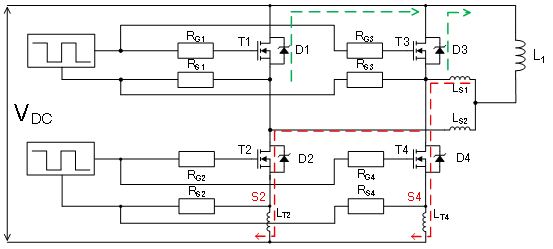
来到关断的过程。红色箭头表示开通时的电流,绿色代表T1和T3关断后的续流路径。和开通过程类似,此时我们要考虑的仍然是两种情况,一种是关断顺序存在差异,另一种是同时关断时回路杂感和电流斜率造成的电位差。第二种情况较开通时类似,我们主要关注关断时的顺序问题。
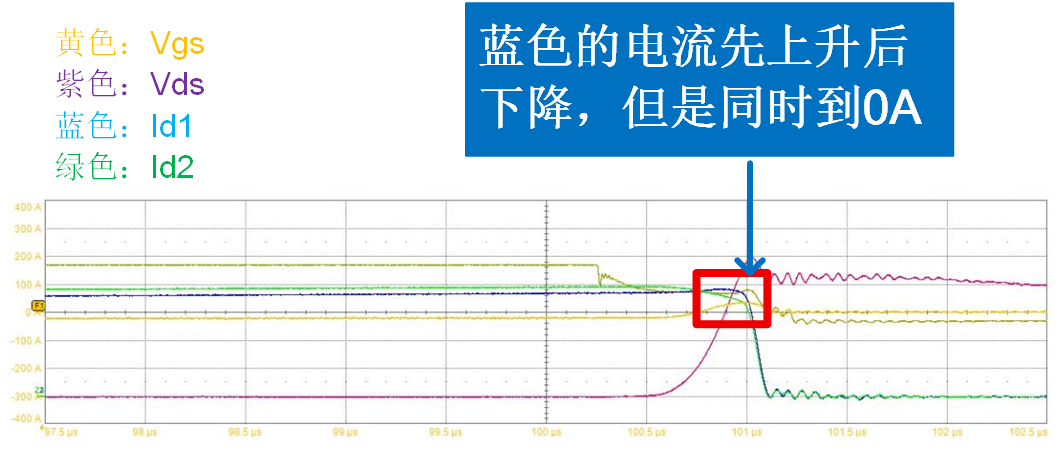
假设T1先关,T3后关,那么T1上减少的电流就会增加到T3上。此时LS2上由于di/dt是负的,就会感应出左负右正的电压,LS1由于电流的瞬时增大,电压就是左正右负的。此时我们会发现T1上的栅极电压由于叠加了一个额外的正压,关断速度变慢,而T3由于叠加了一个负压,关断更快。这中间就形成了一种类似于负反馈的机制。最终并联模块可以做到近乎同时关断。如下图的波形所示,可以看到其中一个模块电流在关断时刻明显的抬升,但是最后几乎在同时关断。
接下来是下桥臂的开通关断分析。相比较于上桥臂,下桥臂最大的差别就是参考地的变化,上桥臂的源极接在了下桥臂的漏极上,而下桥臂的源极直接和DC-相连。我们先从开通过程开始看。下图中绿色的箭头代表上桥臂的续流路径,红色箭头代表T2和T4的电流。我们可以发现,无论T2和T4如何开关,影响的始终都是其漏极上的电位,而不会影响T2和T4本身的栅极电压。S2和S4的电位差取决于功率回路上的杂感LT2和LT4。
来到关断过程,此时无论T2和T4如何关断,其影响都主要集中在LS1和LS2上,LT2和LT4上的电压方向是始终相同的。相比于上桥臂相反的电压方向,我们可以说下桥臂的整体风险是小于上桥臂的。
以上就是对于并联模块在开通关断过程当中的环流的一个简要分析。由于整个电路当中存在着大量的寄生电容,例如栅极上本身就有着CGS和CGD,甚至测量时用的探头上也有寄生电容,因此真实的电路会更加复杂。但无论如何,根本原因还是环流。
3.如何抑制环流
抑制环流有两个重要的方向:驱动和模块。
对于驱动而言,最重要的是两点:
保证并联时信号的一致性
设计特殊的电路来阻断栅极上面的环流
目前对于客户和驱动厂家来说,第一点是比较容易做到的,无论是市面上可以买到的驱动IC,又或者像是板级驱动器,目前都可以做到较好的信号一致性。主要的难点是在栅极回路的环流上的切断。在设计的时候,目前主要有两个思路:
每个模块使用独立驱动,每个驱动单独接受来自上位机的信号。
采用主从板的结构,上位机信号只给主板,并联依靠额外的从板来实现,所有从板信号来自主板。
飞仕得基于自身技术特性和驱动可靠性的角度目前选择的是第二种方案。第一种方案对于信号的一致性要求非常高。并联数越多,越难保证每一个驱动的信号的一致性。SiC普遍在100ns左右就可以开通,10ns的差异就已经会严重影响并联性能。同时在整机运行时,高温对于器件一致性有着极大的影响,所以采用这种方法需要对器件进行筛选。但是其好处就是由于每一个驱动都是单独运行的,肯定不会有任何环流的问题。
第二种方法可以保证优秀的信号一致性。但是其难点在于如何隔断源极上的环流。由于源极连接着驱动的电源,所以在每一块从板上都要做到电源隔离。飞仕得目前的SiC驱动都是基于自研的并联方案,并且在客户现场也得到了充分验证。
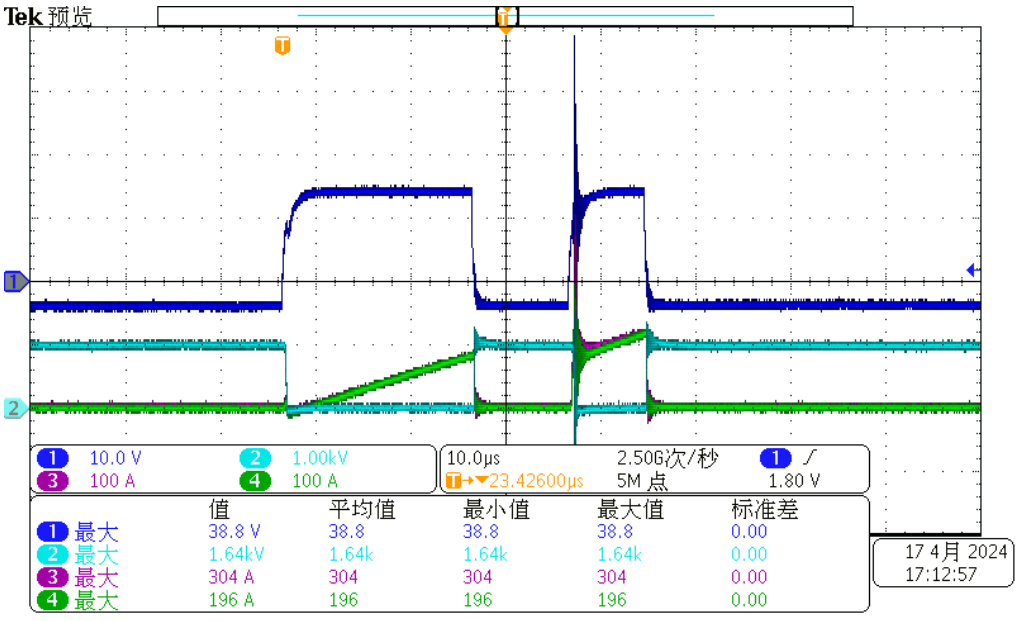
下图是我们专门做的四并联双脉冲测试,使用的是驱动型号是2FHD0620,模块是四个EconoDUALTM但是没有经过任何筛选。四组信号为电流Id。我们可以看到在整个测试当中,我们的驱动不仅可以做到并联模块的同开同关,也可以看出环流得到了极好的抑制,因为在整个过程中电流并未出现明显的振荡。
除了EconoDUALTM,飞仕得也可以提供针对Linpak和XHP2的并联解决方案。如果只是使用TO247这类分立器件或者easy系列的模块呢?飞仕得也可以提供针对SiC驱动设计的电源模块FS02P和FS06P,其超低的原副边耦合电容可以保证电源的稳定性和极低的共模噪声。
对模块而言,一致性筛选非常重要。有两个关键参数:
Vgs(th),栅极的阈值会直接影响并联模块开关的一致性
Rds(on),影响动静态的电流分配
Vgs(th)的影响非常直观,那么Rds(on)的影响究竟有多大呢?
我们假设有两个并联模块,对应的导通电阻为R1和R2,压降都为V,那么电流分配的比就为:
正常情况就是1:1。如果此时R1和R2都有偏差±Δ=10%,那么公式就会变为:
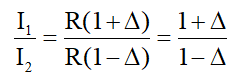
此时电流比就会变为1.22,就是22%的不均流。哪怕是±Δ=5%,电流偏差也会来到10%。如果我们有N个模块并联呢?此时公式可以简单计算为:
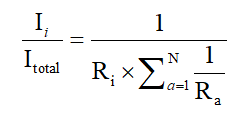
Itotal是总电流。根据每个模块的导通电阻我们可以算出其具体分配到的电流。
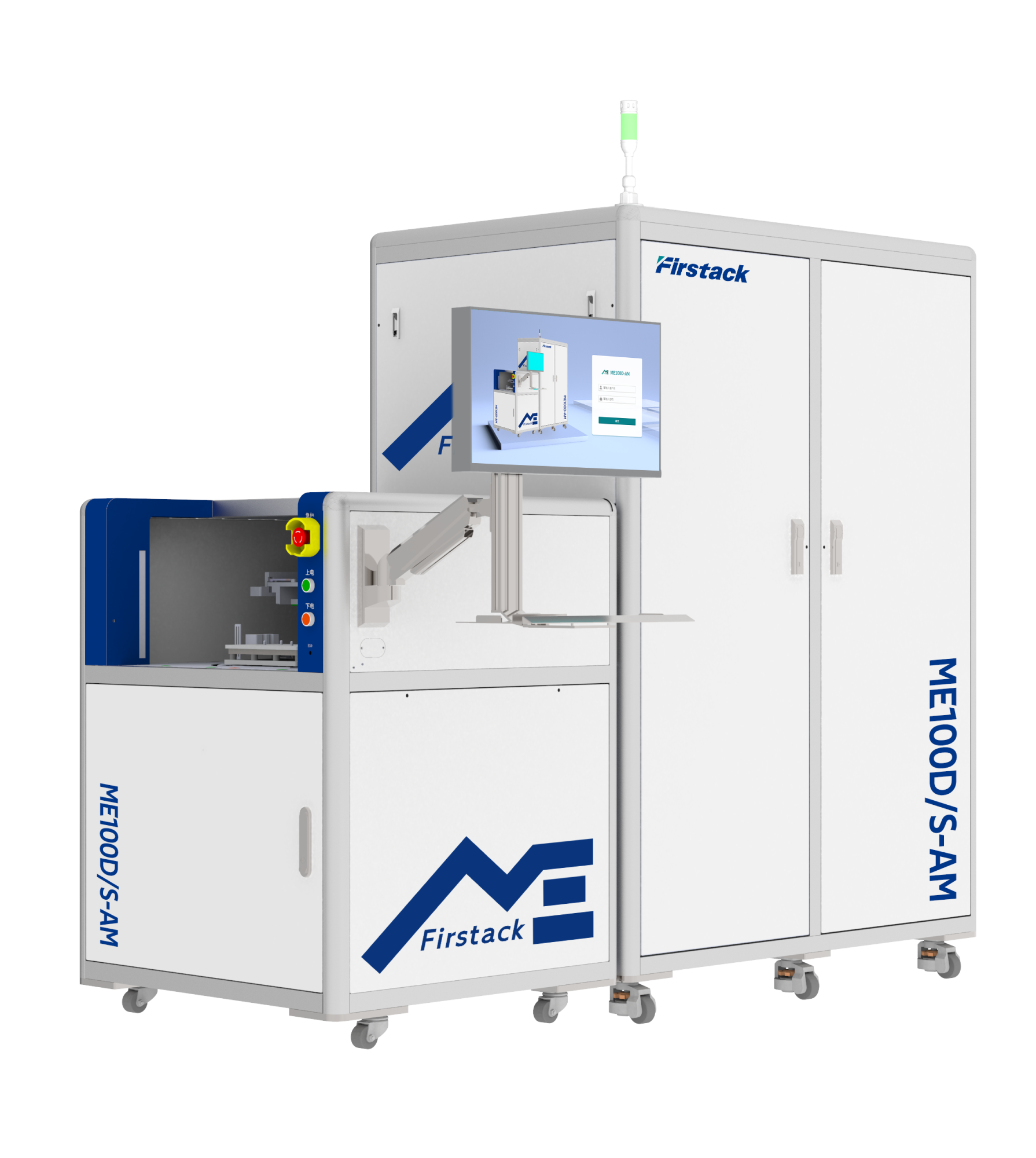
综上所述,并联使用的SiC模块必须要进行一致性的筛选来保证性能。飞仕得针对SiC模块的筛选推出了对应的产品ME100D/S-AM。可以精准的检测模块的静态特性,帮助大家高效便捷的完成模块匹配。
4.并联时的其他问题
除了上面提到的问题,在使用SiC并联时还有什么需要我们注意的呢?
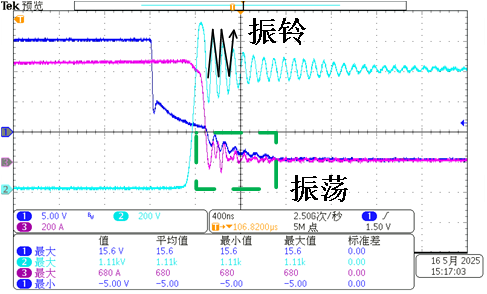
1. 我们必须要分清楚振铃和振荡。振铃的一个显著特质就是较为固定的频率,以及随时间规律衰减的幅值。如果我们对比并联模块的栅极电压或者一些其他电气参数,可以观察到同相的振动。而振动则不同,往往伴随着不固定的频率以及振幅,并联模块的各项参数也呈现非同相的振荡。因此观察到振铃时我们不必担心,这只能说明回路的寄生参数比较大,但是振荡则可能是由于驱动设计和模块本身的性能问题,需要提高警惕。
2. 使用SiC模块并联时,功率回路的对称性对整机性能影响巨大。例如AC输出排,如果两个模块AC侧电流路径上的杂感不同,那么电流的均流就会比较差。
3. 测试时使用的探头非常关键。普通的差分探头是绝对不能使用的。因为差分探头往往有着较大的量程,在测量栅极电压上的振荡时,其准确性很容易受到干扰。地线环和光隔离探头是我们推荐的。同时探头和示波器的带宽也非常关键,我们推荐使用800MHz及以上的带宽来得到相对真实的波形。
结尾
SiC并联对驱动,模块和母排的设计都提出了更高的要求,飞仕得致力于为客户提供全面的功率解决方案,从驱动到模块再到模组,我们都可以提供全面且可靠的产品或者服务。如果大家有兴趣欢迎随时咨询。